Roller Coaster Simulation
Abstract
This project simulates the motion of a rollercoaster cart propelled by a Permanent Magnet Linear Synchronous Motor (PMLSM) across a complex track profile. The simulation incorporates realistic physics including gravitational forces, friction, and air resistance to analyze whether the motor's 4-second thrust is sufficient to complete the course. Developed in MATLAB/Simulink, this model serves as a valuable tool for roller coaster design and safety analysis.
Technical Implementation
Mathematical Modeling
- Dynamic equations of motion accounting for variable track inclines
- PMLSM motor thrust characteristics and power delivery
- Friction models including rolling resistance and air drag
- Energy conservation validation framework
Simulation Framework
- MATLAB/Simulink implementation with modular subsystems
- Interconnected motor and cart dynamics models
- Custom track profile configuration
- Real-time data visualization capabilities
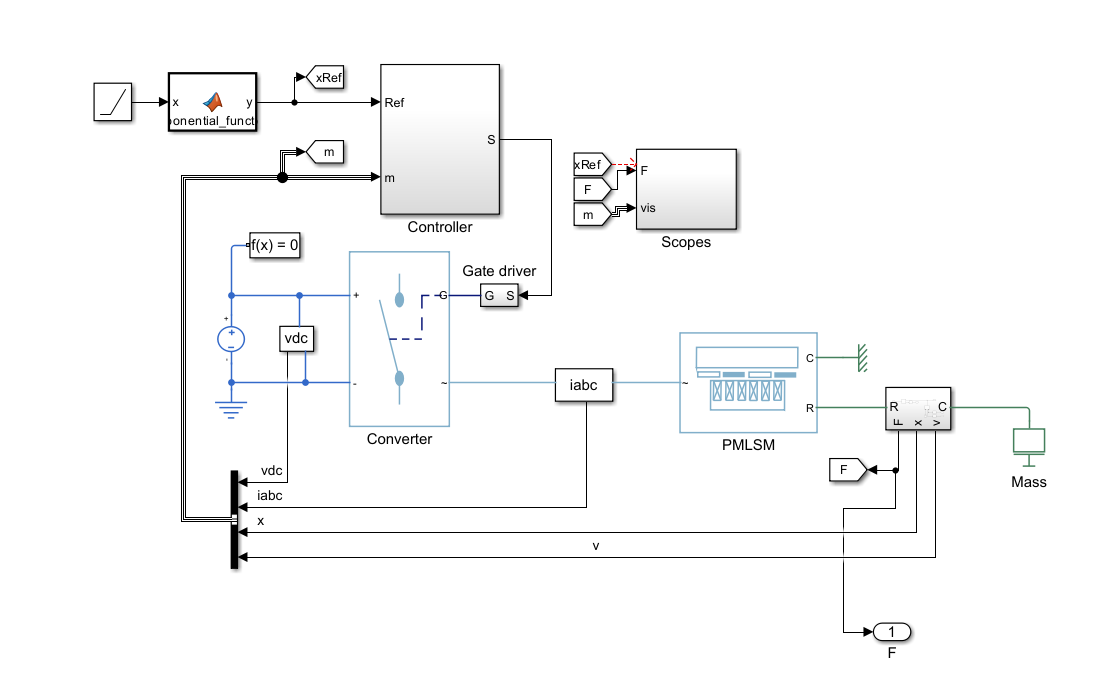
Complete simulation framework showing the interaction between motor, cart, and track subsystems
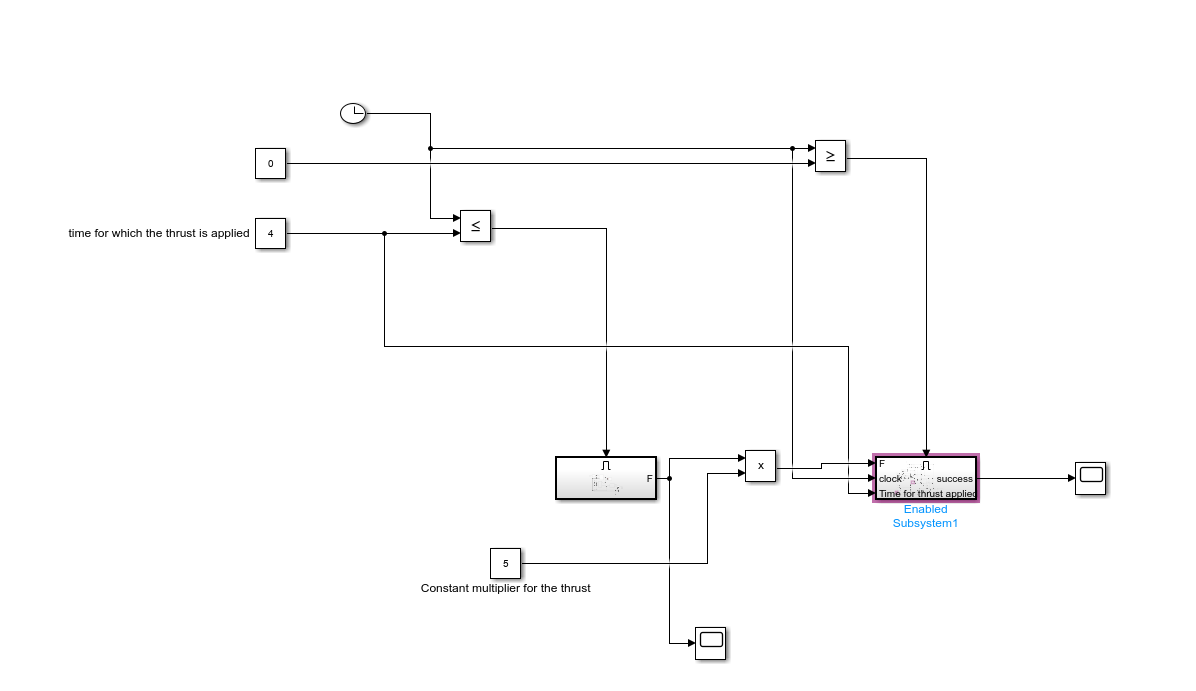
Thrust profile and electrical characteristics of the linear synchronous motor
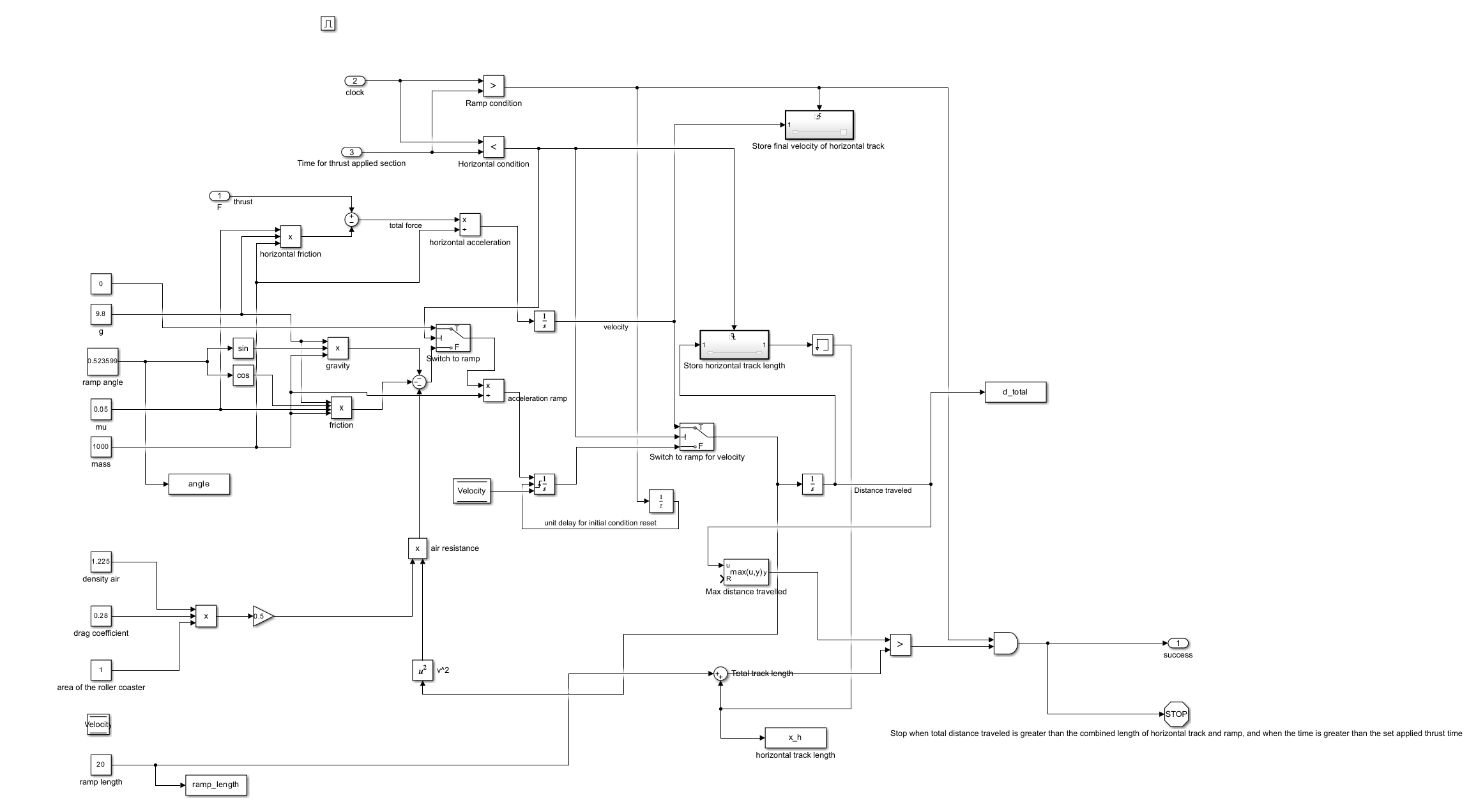
Variable incline track with marked sections for force analysis
Key Simulation Features
Motor Thrust Analysis
Detailed modeling of the PMLSM's 4-second acceleration phase and its impact on initial velocity
Incline Performance
Simulation of cart behavior on various track slopes and transitions
Force Monitoring
Real-time tracking of gravitational, frictional, and air resistance forces
Results and Impact
The simulation provided critical insights into roller coaster dynamics and design considerations:
Performance Metrics
Precise velocity and position tracking throughout the course
Safety Analysis
Identification of critical force thresholds and potential failure points
Design Validation
Confirmation of motor specifications for given track profiles
Future Enhancements
- Integration of 3D visualization for track design
- Advanced passenger comfort analysis metrics
- Multi-cart interaction simulations
- Weather condition impact modeling
Conclusion
This roller coaster simulation project successfully demonstrates the power of computational modeling in amusement ride design. By accurately simulating the complex interplay between motor thrust, track geometry, and environmental forces, the project provides a robust framework for evaluating roller coaster performance and safety. The results validate the PMLSM motor's capability to propel the cart through the specified course while offering valuable insights for optimizing future designs. This approach significantly reduces the need for physical prototyping, enabling more efficient and cost-effective roller coaster development.