Autonomous Logistics Robot - IEEE Competition
🎯 Competition Objective
Develop an autonomous mobile manipulator system for an IEEE robotics competition. The challenge involves navigating a 5x5 unknown grid maze containing 4 randomly placed colored cubes (2 blue, 2 red) and corresponding colored drop-off bins. The robot must autonomously scan the maze, identify objects, calculate optimal paths, and successfully transport each cube to its matching colored destination.
🤖 Challenge Overview
The IEEE logistics robotics competition presented a complex autonomous manipulation challenge:
- 5x5 grid maze with unknown layout and random object placement
- 4 colored cubes (2 blue, 2 red) positioned randomly throughout the maze
- Corresponding colored drop-off bins requiring precise color matching
- Fully autonomous operation - no human intervention allowed
- Time-critical performance evaluation
🧱 System Architecture
Our solution integrated advanced robotics hardware with intelligent algorithms for autonomous logistics operations:
Mobile Manipulator Platform
- Hiwonder Mobile Manipulator as the primary robotic platform
- Integrated mobility base with precision manipulator arm
- End-effector designed for reliable cube grasping and placement
- Sensor fusion for simultaneous navigation and manipulation
Computer Vision System
- Real-time object detection for colored cube identification
- Color classification algorithms for blue and red cube discrimination
- Drop-off bin detection and color matching verification
- Visual SLAM for maze mapping and localization
Path Planning & Navigation
- Dijkstra's algorithm for optimal path calculation
- Dynamic maze exploration and mapping
- Obstacle avoidance and collision detection
- Multi-objective optimization for efficient task sequencing
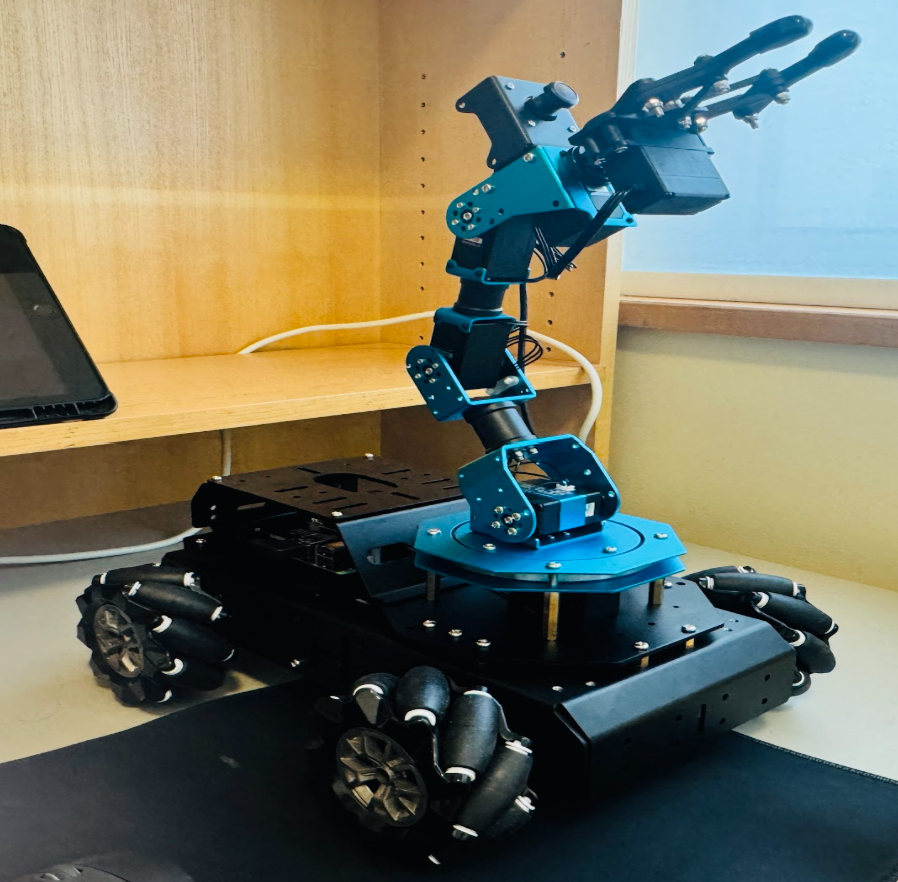
Hiwonder Mobile Manipulator autonomously navigating the 5x5 maze, identifying colored cubes, and executing optimal pickup and delivery tasks
🧠 Key Capabilities
Autonomous Maze Exploration
Dynamic scanning and mapping of the unknown 5x5 grid environment with real-time obstacle detection
Color-Based Object Detection
Computer vision system for accurate identification and classification of blue and red cubes
Optimal Path Planning
Dijkstra's algorithm implementation for shortest path calculation to minimize task completion time
Precision Manipulation
Accurate grasping, lifting, and placement of cubes using the integrated manipulator arm
Color Matching Logic
Intelligent algorithm ensuring each colored cube reaches its corresponding drop-off bin
Real-Time Execution
Time-optimized autonomous operation meeting competition performance requirements
🔧 Technical Challenges & Solutions
Unknown Environment Mapping
Implemented SLAM techniques for real-time maze exploration and dynamic map building without prior knowledge
Time Optimization
Developed efficient task sequencing algorithms to minimize total completion time in competitive environment
Precision Manipulation
Calibrated visual-servo control for accurate cube pickup and placement in confined maze spaces
🏆 Competition Results & Impact
This IEEE robotics competition project showcased advanced autonomous systems integration:
Competition Performance
Successfully demonstrated fully autonomous logistics operation in challenging unknown environment
Technical Innovation
Integrated computer vision, path planning, and manipulation in a cohesive autonomous system
Real-World Applications
Demonstrated technologies applicable to warehouse automation and logistics robotics
📈 Impact and Applications
This assistive technology project addresses critical mobility challenges for visually impaired individuals in urban environments:
Accessibility Innovation
Intuitive feedback system replacing complexity with meaningful, actionable guidance
Safety Enhancement
Real-time obstacle detection and traffic light recognition for safer navigation
User-Centered Design
Lightweight, comfortable, and intuitive design based on user feedback and testing
🧮 Algorithmic Approach
System Workflow
- Phase 1: Autonomous maze exploration and environmental mapping
- Phase 2: Object detection and color classification of cubes and bins
- Phase 3: Dijkstra's algorithm for optimal path calculation
- Phase 4: Sequential task execution with pickup and delivery operations
- Phase 5: Verification and completion confirmation
🔮 Future Applications
- 🏭 Automated warehouse management and inventory systems
- 🚛 Autonomous logistics and supply chain robotics
- 🏥 Hospital material transport and pharmaceutical logistics
- 🏪 Retail automation and smart inventory management
- � Laboratory sample handling and automated testing systems
- � Advanced multi-robot coordination for large-scale logistics
🎯 Project Reflection
The IEEE logistics robotics competition provided an excellent platform to integrate multiple robotics disciplines into a cohesive autonomous system. The project required seamless coordination between computer vision, path planning algorithms, and precision manipulation control.
Working with the Hiwonder Mobile Manipulator taught me the complexities of real-time autonomous decision-making in unknown environments. The implementation of Dijkstra's algorithm for optimal path planning, combined with dynamic object detection and color classification, demonstrated the power of intelligent systems in solving logistics challenges.
This competition experience highlighted the importance of robust system integration, efficient algorithm design, and the critical role of computer vision in modern robotics applications. The project serves as a foundation for understanding autonomous logistics systems that are increasingly vital in industrial automation and smart manufacturing environments.